- 홈
 김용재 교수(전기•전자•통신공학부) 연구팀이 지난 달 말 국제로봇학회(IROS. IEEE/RSJ International Conference on Intell...', 'KOREATECH WEBZINE', 'https://webzine.koreatech.ac.kr/newshome/mtnmain.php?mtnkey=articleview&mkey=bestlist&mkey2=1&aid=18059&bpage=1&stext=', 'https://webzine.koreatech.ac.kr/enewspaper/upimages/1528174163admin.JPG');){kind=link}
코리아텍(총장 김기영) 김용재 교수(전기•전자•통신공학부) 연구팀이 지난 달 말 국제로봇학회(IROS. IEEE/RSJ International Conference on Intelligent Robots and Systems) 주최로 스페인에서 진행하는 ‘IROS 2018 Fan Robotic Challenge Phase I’(로봇팔 고속파지 챌린지 대회 예선) 종합 조직부문(Mobility B)에서 미국 NASA와 독일 DLR 등 세계 우수팀들과 공동 우승을 차지했다.
IROS는 세계 최대 규모의 로봇 학회로서 매년 세계 2,500명 이상의 석학 및 연구자들이 참가하는 명성있는 대회다. 이번 대회에는 총 20개 팀이 참가했으며, 올 가을에 본선대회가 열린다.
‘종합 조직 부문’은 대회는 로봇을 이용, 테이블 위에 놓은 부채를 빠르게 수직으로 들어 올린 후, 펼치고 닫는 동작을 한 후 내려놓은 작업을 수행하는 것이 목표다. 참가팀들은 지난 3월 로봇 동작 영상을 대회본부에 제출, 5월 말 심사결과를 통보받았다.
이번 대회에서 김용재 교수팀이 출품한 로봇은 네이버 랩스의 지원으로 개발한 경량 고성능 로봇에 물체 파지를 위한 전용 집게(gripper)를 제작해 부착하고 고속 파지와 조작을 위한 제어 시스템을 입력한 것이다.
김용재 교수는 “부채와 같이 형상이 바뀌는 복잡한 물체를 로봇으로 파지하고 조작하는 것이 매우 도전적인 부분”이라며 “단일 조작 분야에서는 부채를 로봇에 쥐어준 채로 시작하여 펴고 접는 작업만을 수행하지만, 종합 조작 부문에서는 테이블 위의 부채를 스스로 들어올리고 펴고 접은 후 내려놓는 것까지 포함하므로 난이도가 높다”고 설명했다.
김 교수는 “우리팀은 4학년 학부생 3명(송한솔, 김윤수, 서지원)과 석사 대학원생 2명(윤준석, 윤성호)이 참여한 젊은 팀으로서, 로봇 연구를 시작한지 불과 6개월이 된 멤버들이지만, 자유롭게 아이디어를 내고 검증하는 작업을 통해 높은 성능을 가진 로봇시스템을 구현, 세계 우수한 팀들과 경쟁해 의미있는 성과를 거두 점이 자랑스럽다”고 소감을 밝혔다.<끝>

▲ 김용재 코리아텍 교수 연구팀은 ‘IROS 2018 Fan Robotic Challenge’(로봇팔 고속파지 챌린지 대회) 종합 조직부문(Mobility B)에서 세계 우수팀을 제치고 우승을 차지했다. 사진은 김용재 교수(앞줄 왼쪽), 학부생 3명, 대학원생 2명이 부채질하는 로봇(가운데)을 둘러싸고 있는 모습.
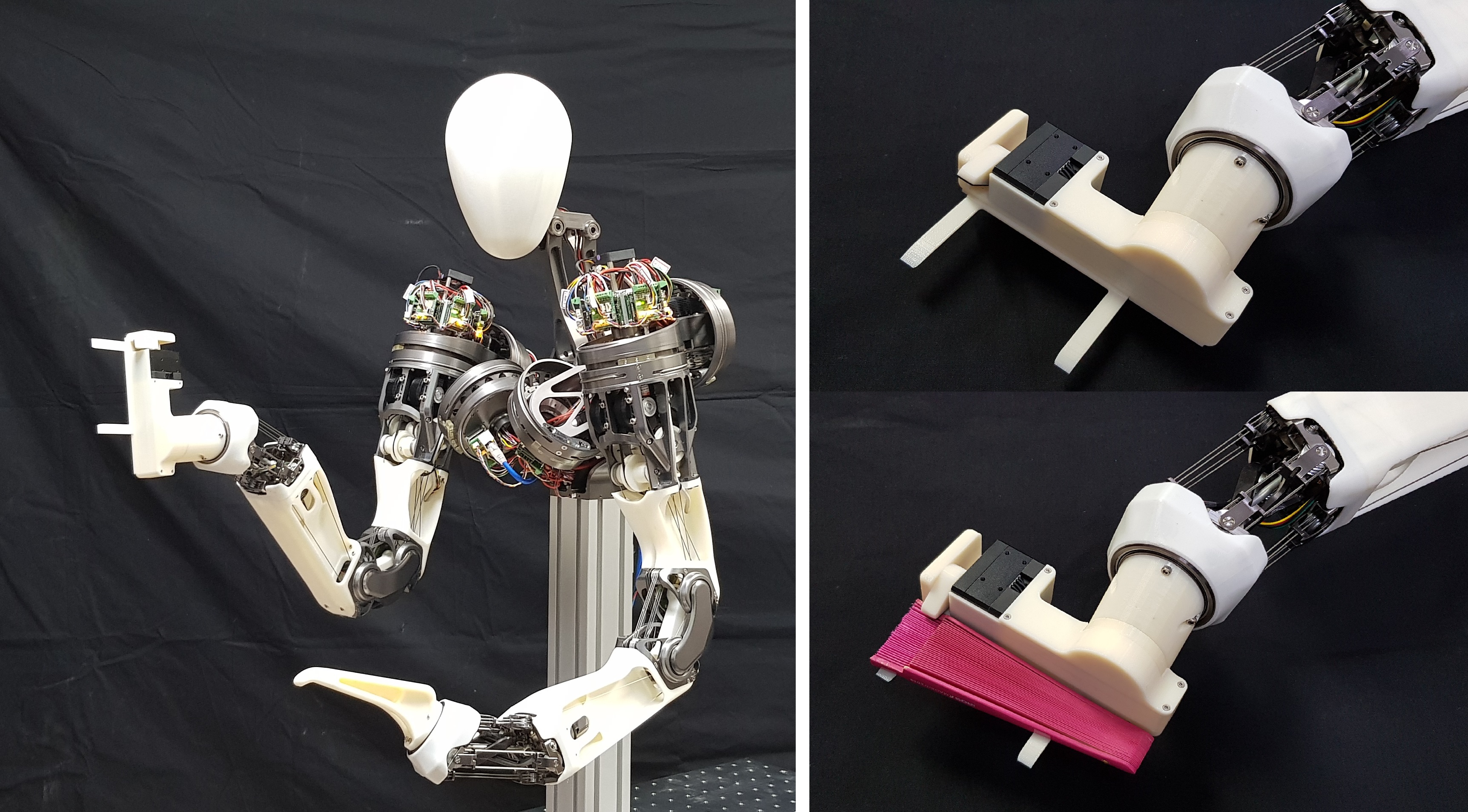
개발된 로봇과 전용 그리퍼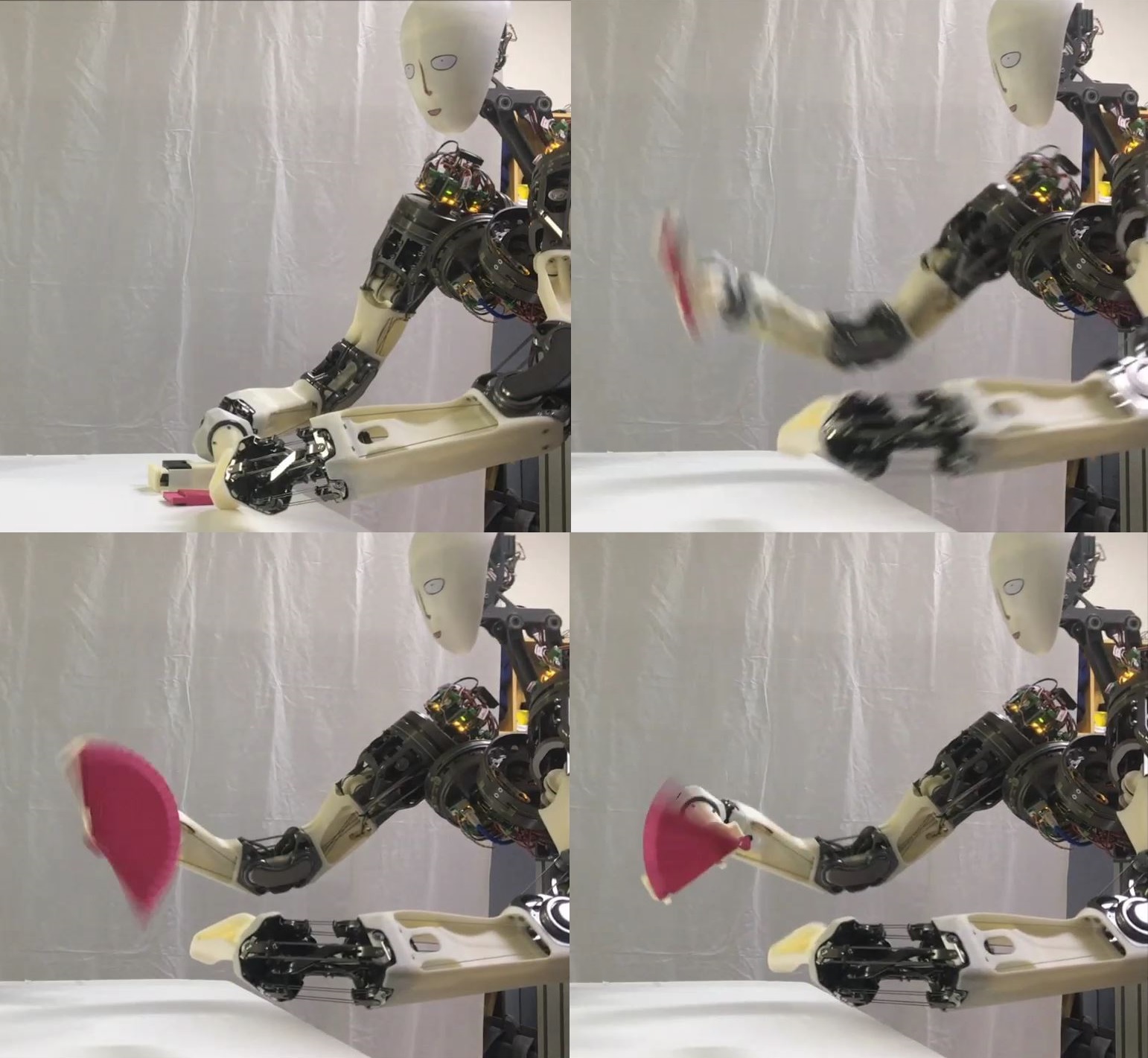
동작사진
